当前位置:首页 >> 解决方案 >> 机器人码垛/拆垛系统
机器人码垛/拆垛系统
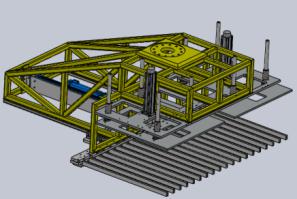
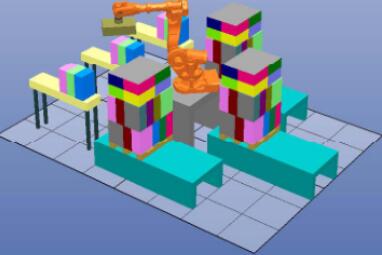
 码垛应用-整层式
码垛应用-整层式
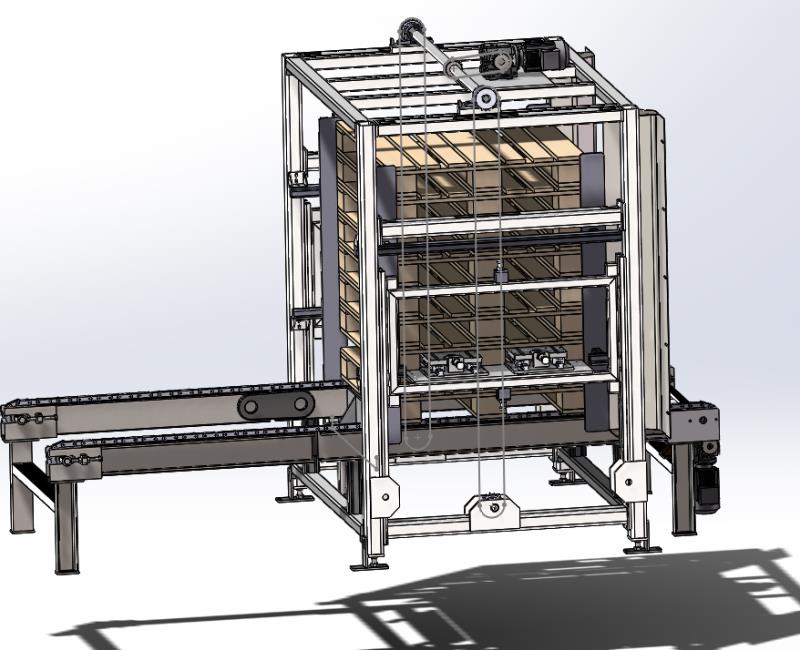
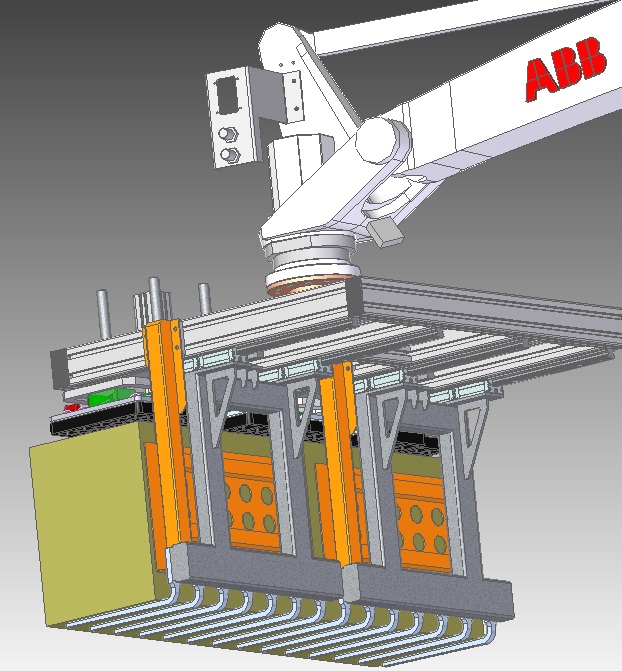
整层夹具(对叉或卷帘):抓取区需要比上述都要复杂的整理机构,其中对叉 式与半层夹具差别不大,但需要占用较大的托盘输送空间(只能单向放,夹具长度在2.8M 左右),而卷帘所需整理机构贵不少,但只需要约正常一段托盘输送空间即可,两者选择根据实际布局和经济角度考虑。
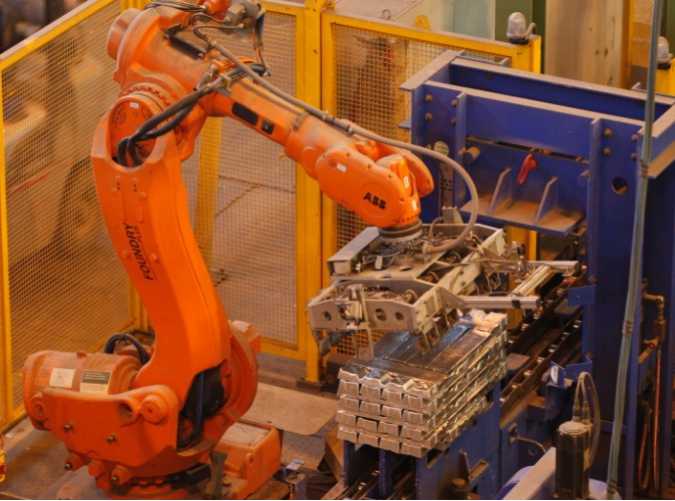
节拍对叉式:平均16s/抓(此夹具布局最好不让旋转),夹具约为185kg ;
节拍卷帘式:平均18s/抓(最快可以做到16.2s),夹具约为240kg ;
模块化设计

独立控制方式

安全保障
Copyright © 上海松盛机器人系统有限公司 . All Rights Reserved . 沪ICP备10002976号-3 苏州网站建设