当前位置:首页 >> 解决方案 >> 机器人码垛/拆垛系统
机器人码垛/拆垛系统
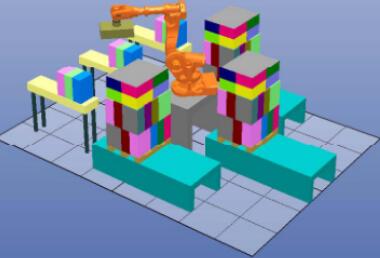
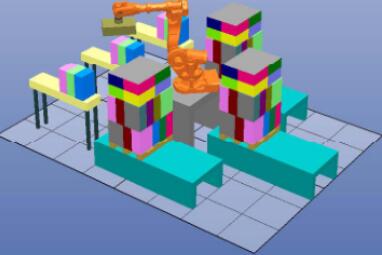
 码垛应用-半层式
码垛应用-半层式
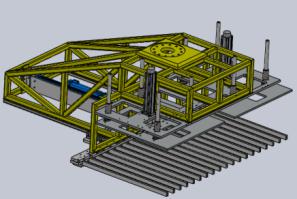
压托式(定数或半层):定数压托式例如烟草行业的夹具定数抓取,对于半层压托式或两侧夹托式会对垛型进行2次或3次抓取(3次情况主要是当抓取有较小的箱子,奇偶层会出现小边在外侧,易掉箱),半层夹具需要有整理机构,若考虑整理缓存(整理缓存会减少等待时间)通常会有一个暂存平台对应机器人抓取,根据不同垛型进行先排列,此整理机构较单排复杂。
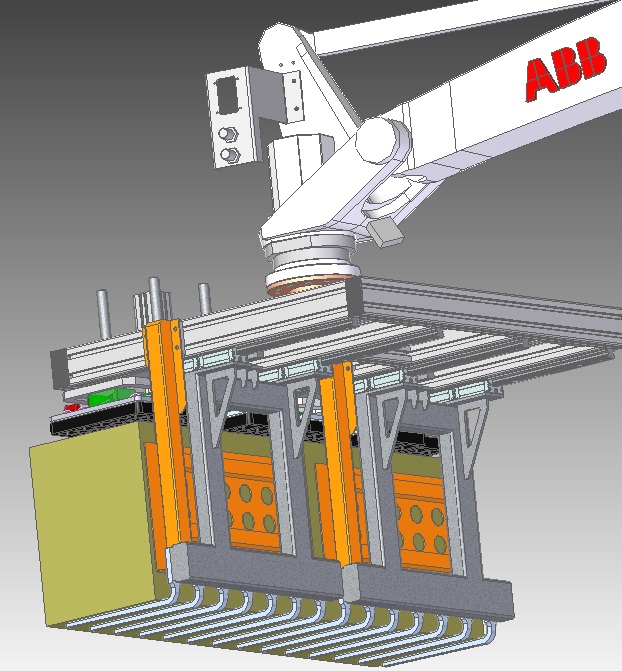
节拍:平均12s/抓,夹具约为150kg ;
模块化设计

独立控制方式

安全保障
Copyright © 上海松盛机器人系统有限公司 . All Rights Reserved . 沪ICP备10002976号-3 苏州网站建设